


知っていますか?ロボットのティーチングと仕組みについて
2022年02月03日 10:43:53
ロボットは、あらかじめ教えられた動作を実行する機械です。
制御内容は「プログラミング」により定められます。
ロボットが作業する位置(姿勢)をロボットに教えることを「教示作業」(ロボットティーチング)といいます。
教示作業の手順
教示内容を保存するためにプログラムに名前を付けて保存する。
ティーチングペンダントを使ってプログラムで使用したい位置にロボットを移動させる。
ティーチングペンダントを使って名前を付けて、現在の位置(姿勢)を覚えさせる。
ロボットを次に記憶する位置に移動させ、その点を記憶する。
作業に必要な教示を全て①~③のように行う。
教示作業の手順
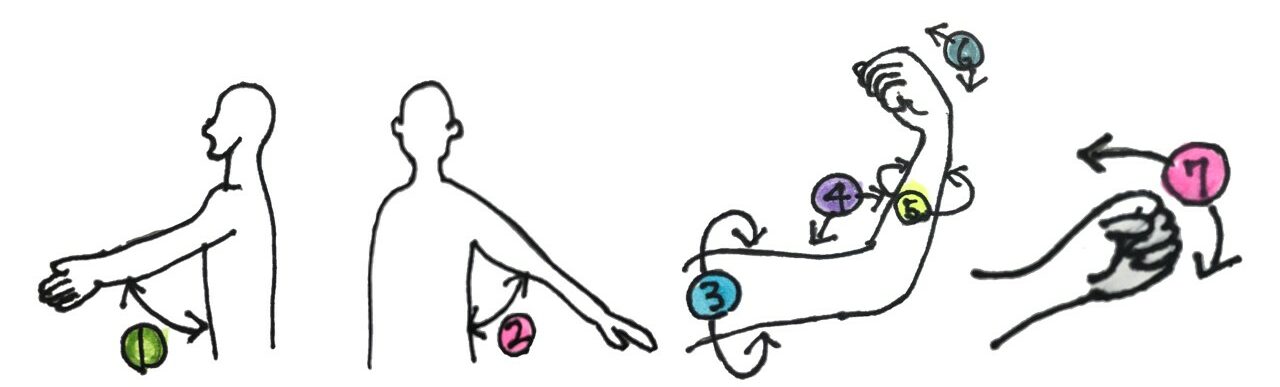
機械のロボットと人間……遠い存在のように感じますが、実は骨と関節の構造が一緒なのです。
人間の体で言えば、肘や肩など自由に曲がる部分がジョイント、その間を繋ぐ骨の部分がリンクということになります。ジョイントを動かしてリンクで力を伝えるという原理は、人間もロボットも同じです。
ロボットの座標系

ロボットをティーチングする際、座標系を選択し、操作します。座標系には関節座標系・直交座標系・ツール座標系などがあります。
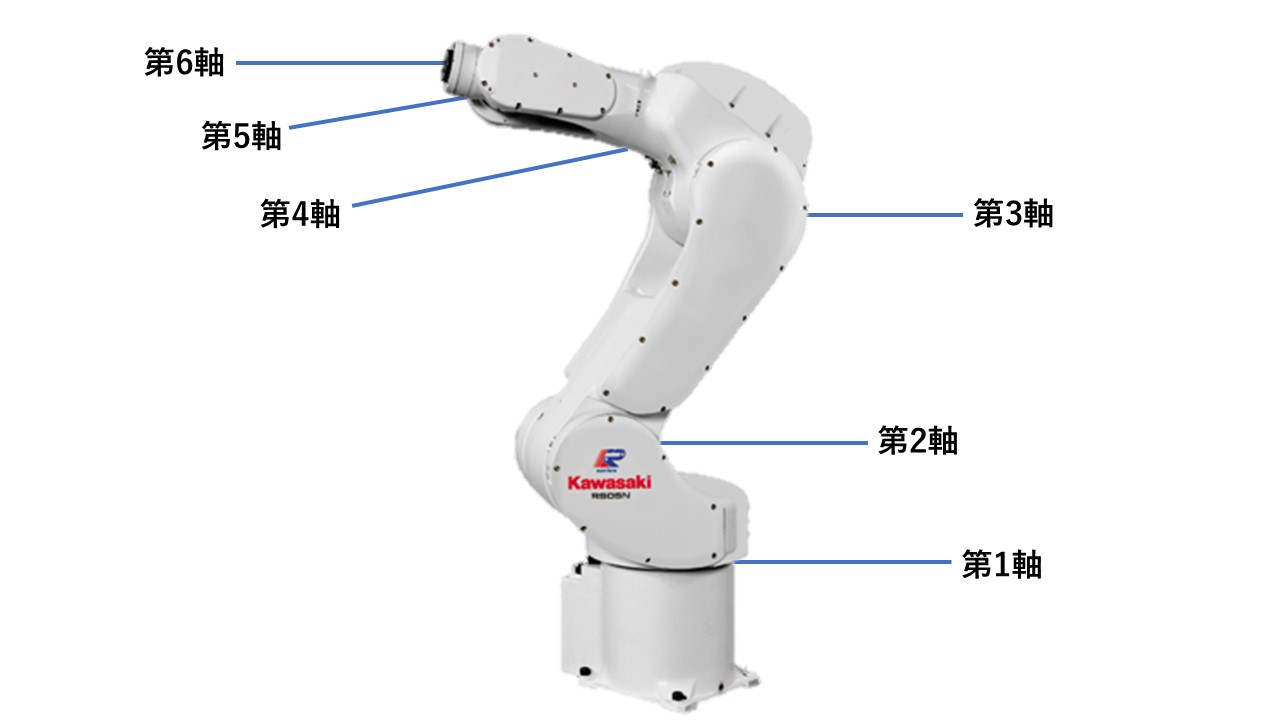
1.関節座標系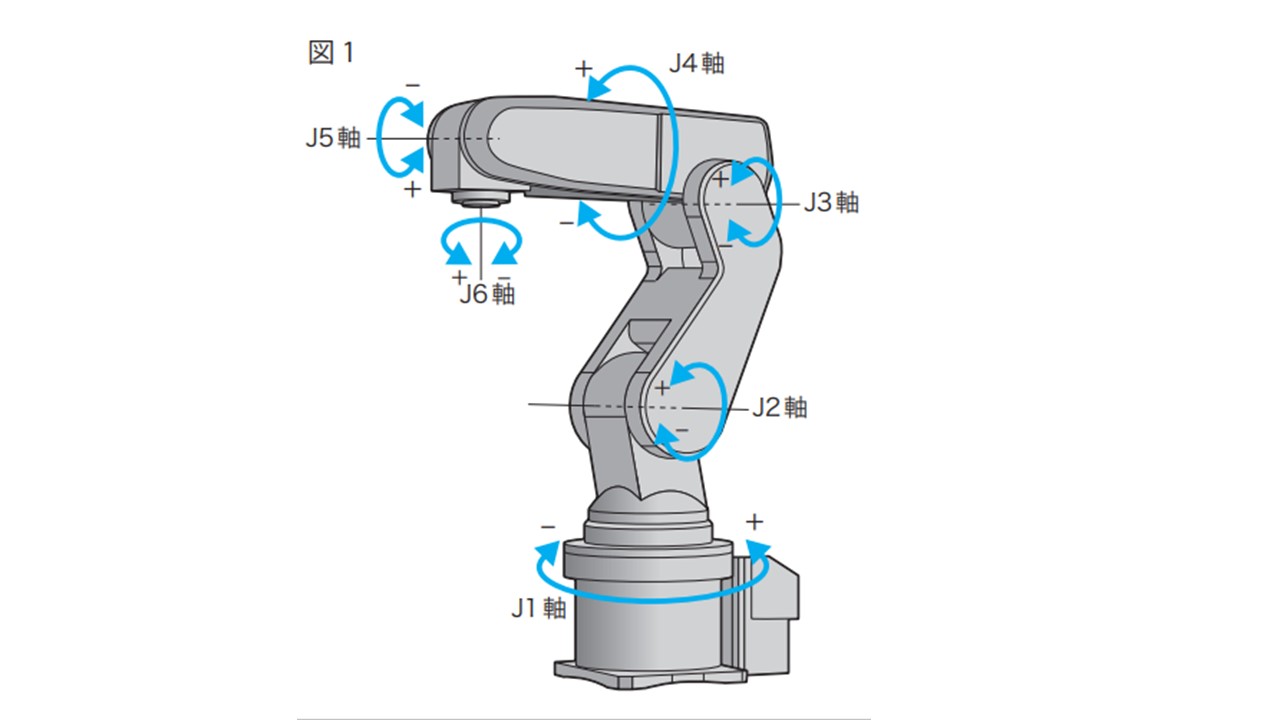
ロボットの各関節の回転角度を値とする座標系のことをいいます。6軸多関節型ロボットの場合、関節座標は6個の要素で成り立っており、図1のように表されます。
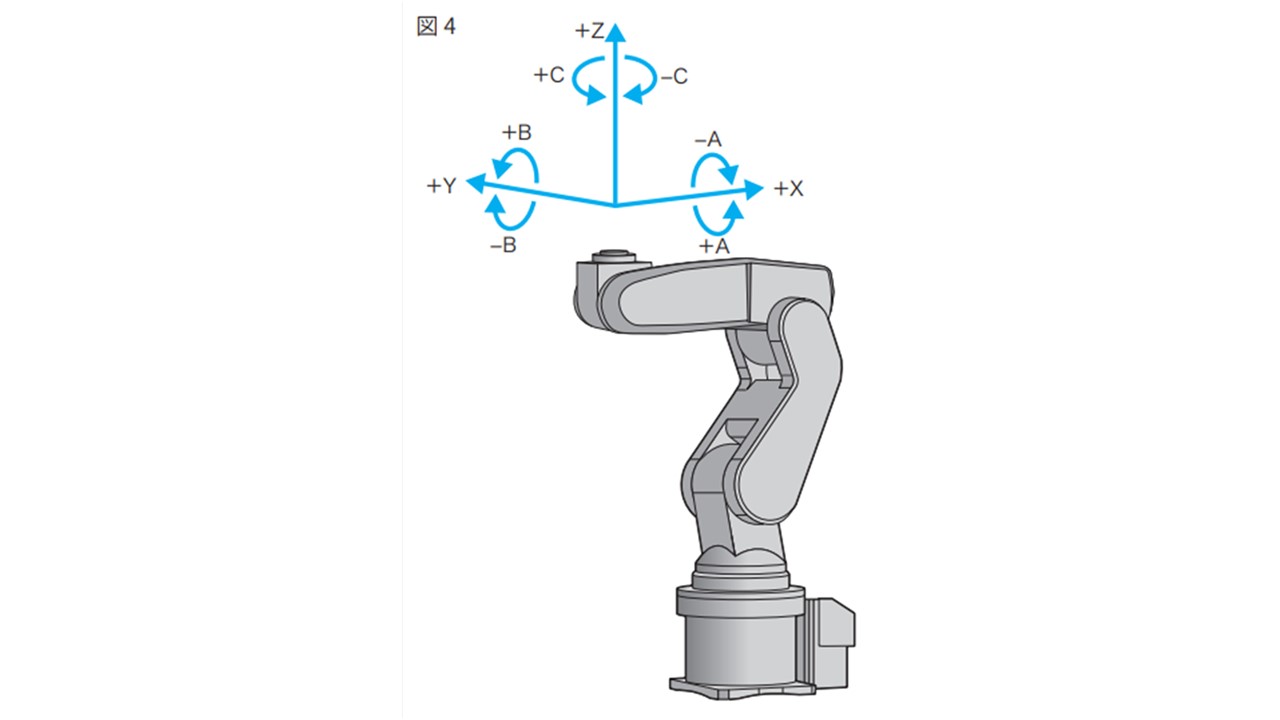
2.直交座標系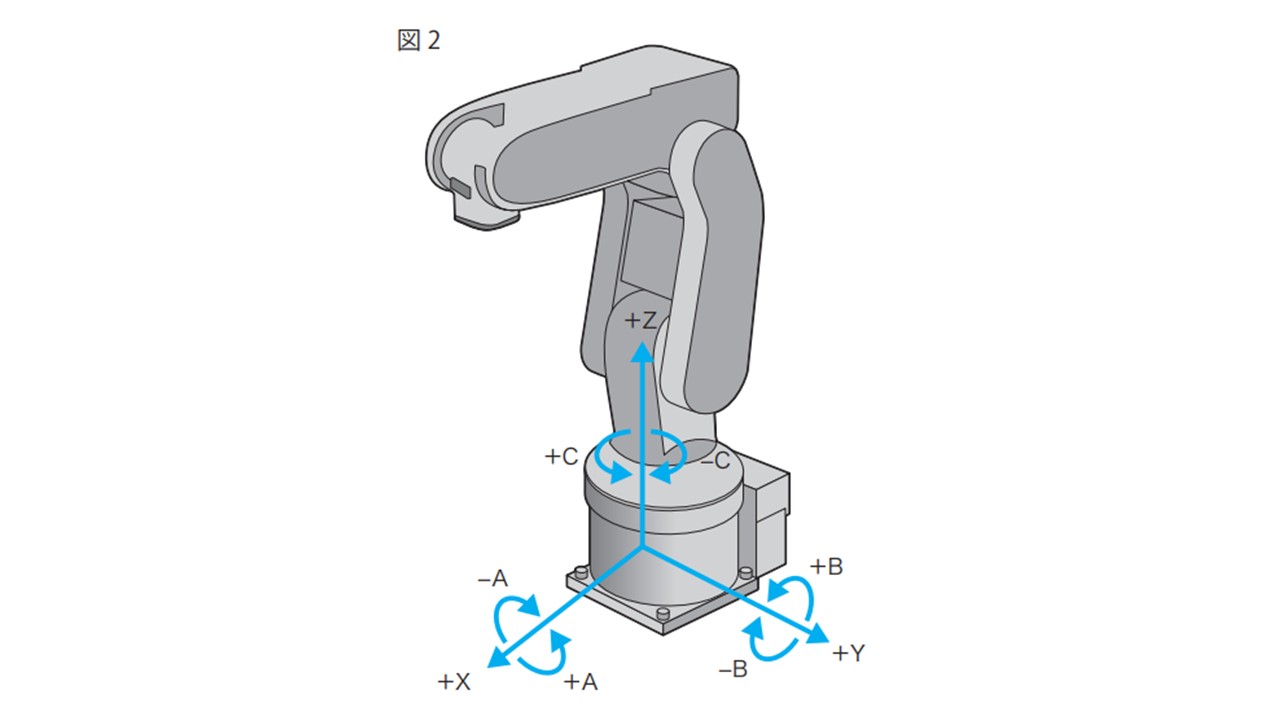
直交座標系とは互いに直交している座標軸を指定することによって定まる座標系のことを言います。
3.ツール座標系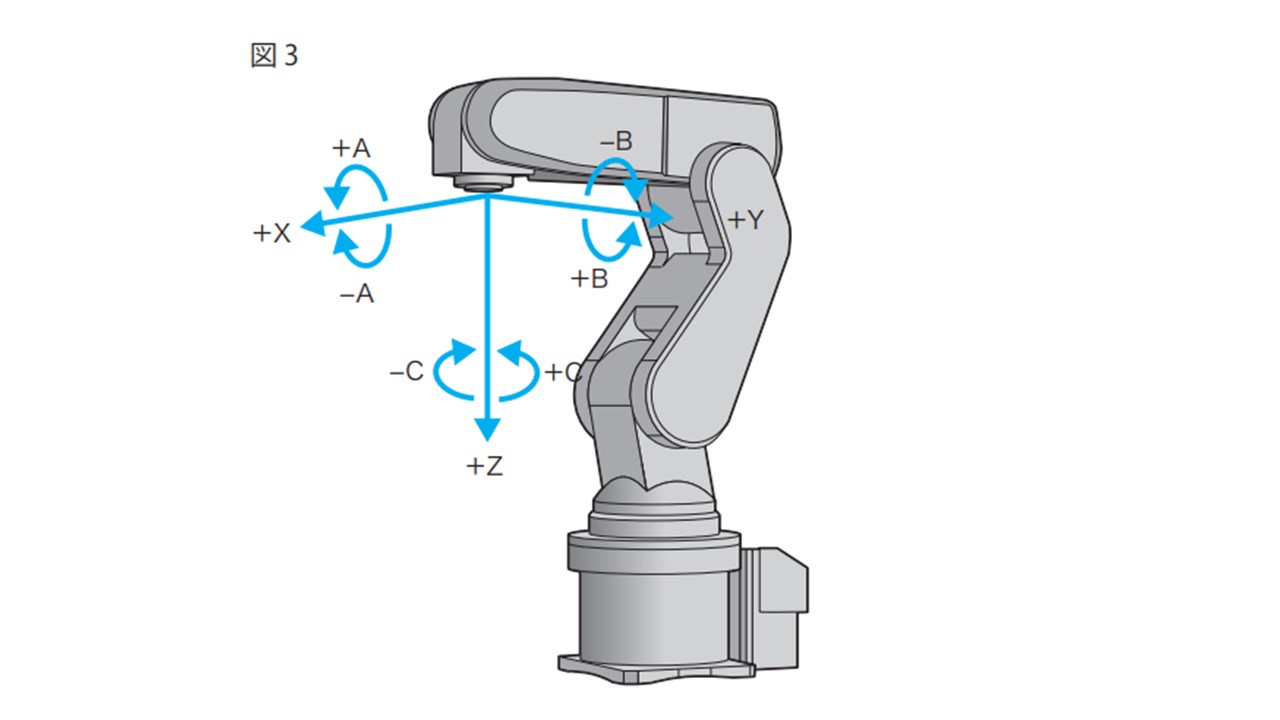
ツール座標系とはロボットのハンド先端を原点とした直交座標系のことをいいます。ハンドの向きに対する前進・後退動作を行うため、ハンドの向きを変えずに動作させることが出来ます。
教示作業に関する関係法令
労働安全衛生規則第36条第31号、第150条の3、第151条などでは次のような手順をふむように規定されています。
産業用ロボットの種類、構造、作業方法に見合った作業規定を作成し、これを遵守するように自主管理を行う。
2.直ちに運転を停止できる措置を講じる(第150条の3)
教示中に危険を察知したならば、直ちに可動領域内にいる教示者か、外部にいる監視者などにより、産業用ロボットを緊急に停止できるようにする。
3.作業中である旨の教示(第150条の3)
教示作業中である事を明示し、教示者以外には産業用ロボットの操作を行わせないようにする。
4.特別教育の実施(第36号 31号)
教示者には、産業用ロボットの基本的な構造、危険の源泉、回避方法などを教育することにより、災害防止のために必要な知識、技能を習得させる。
5.作業開始前の点検等(第151条)
作業を開始する前には決められた点検を実施する。点検に漏れが無いよう、あらかじめチェックを作成しておく。
点検・お見積りも承ります
Contact
